Cosechadoras autopropulsadas 1947 - 2022

El modelo 55 fue la primera cosechadora autopropulsada de John Deere y, en muchos sentidos, se adelantó a su tiempo, ya que su arquitectura de diseño fue la precursora de las cosechadoras actuales.
La posición de conducción central es elevada, con vistas al alimentador de mies y al cabezal. El motor está situado detrás del conductor, cerca de las ruedas traseras. El depósito de grano está cerca del eje delantero para aumentar la estabilidad, ya que el peso adicional sobre el eje delantero proporciona una tracción extra, dejando las ruedas traseras para la dirección.
El desarrollo de la cosechadora autopropulsada ha cambiado la forma en la que se alimenta el mundo. En la actualidad, las cosechadoras John Deere recolectan más de la mitad de grano del mundo. La historia de su éxito, desde el modelo 55 hasta la serie X, es una historia de innovación técnica y de un servicio de atención al cliente de alta calidad a través de una red de concesionarios profesionales.
1947 Cuando empezó todo
El diseño del modelo de John Deere 55 fue el precursor delas cosechadoras actuales. Su posición de conducción central es alta, por loque se ven desde arriba el alimentador de mies y el cabezal con una anchura de12 pies. El motor se encuentra cerca de las ruedas traseras, detrás delconductor. El depósito de grano está cerca del eje delantero para unaestabilidad adicional, y el contrapeso delantero se sitúa por encima del ejedelantero, ofreciendo así una tracción extra y dejando las ruedas traseras parala dirección. Transformó la eficiencia de la cosecha gracias a su capacidad decorte de aprox. 1,6 ha/h, en comparación con las 12 ha/h de la serie X.

1954 Cosechadora para laderas
La nivelación automática 55H integrada en la experiencia de las cosechadoras para laderas, cuyos inicios se remontan a 1936, con el modelo 36B tirado por caballos. Los vídeos publicitarios promocionaron muchas prestaciones que a los conductores de hoy en día les resultarían muy familiares: dirección asistida de ‘un dedo’, potentes frenos de discos y transmisión de avance de velocidad variable.

1963 Cadenas de orugas
Las primeras cadenas de orugas se desarrollaron a partir de la maquinaria de construcción. Sus placas de acero requerían un engrase frecuente y las velocidades en carretera eran bajas. Aquí se han estado utilizanto para la cosecha de arroz en Italia. Tenían el mismo perfil triangular que las cadenas de orugas actuales, y pasaron más de 40 años hasta que llegaron las cadenas de orugas de caucho fiables.

1970 Acoplamiento del cabezal Quick Tach
Los cabezales de las cosechadora antiguas estaban integradoscon el alimentador de mies y se podía tardar fácilmente más de una hora ensustuirlos. Las cosechadoras se desplazaban al campo con el cabezal acoplado,lo que limitaba su anchura a 2,55 m en Europa. Al introducirse el sistema QuickTach en las cosechadoras 3300-
7700, fue posible remolcar los cabezales detrás de lacosechadora y acoplarlos en el campo en pocos minutos. Esto permitiódesarrollar modelos más anchos y con mayor capacidad que duplicarían lacapacidad de cosecha en los 10 años siguientes

1982 Serie 1000 con cabina integrada
Las primeras cabinas comenzaron a aparecer en la década de1960 como un elemento opcional. Tenían un diseño muy básico que mantenía alconductor alejado del polvo, pero eran muy ruidosas e insoportables en díascalurosos. Hasta 1982, con la llegada de la serie 1000, no se introdujo en lascosechadoras algo similar a lo que hoy en día entendemos por una cabina. Eramás silenciosa y refinada. Estaba equipada también con aire acondicionado, ycon el paso de los años se se fueron añadiendo más sistemas electrónicos.

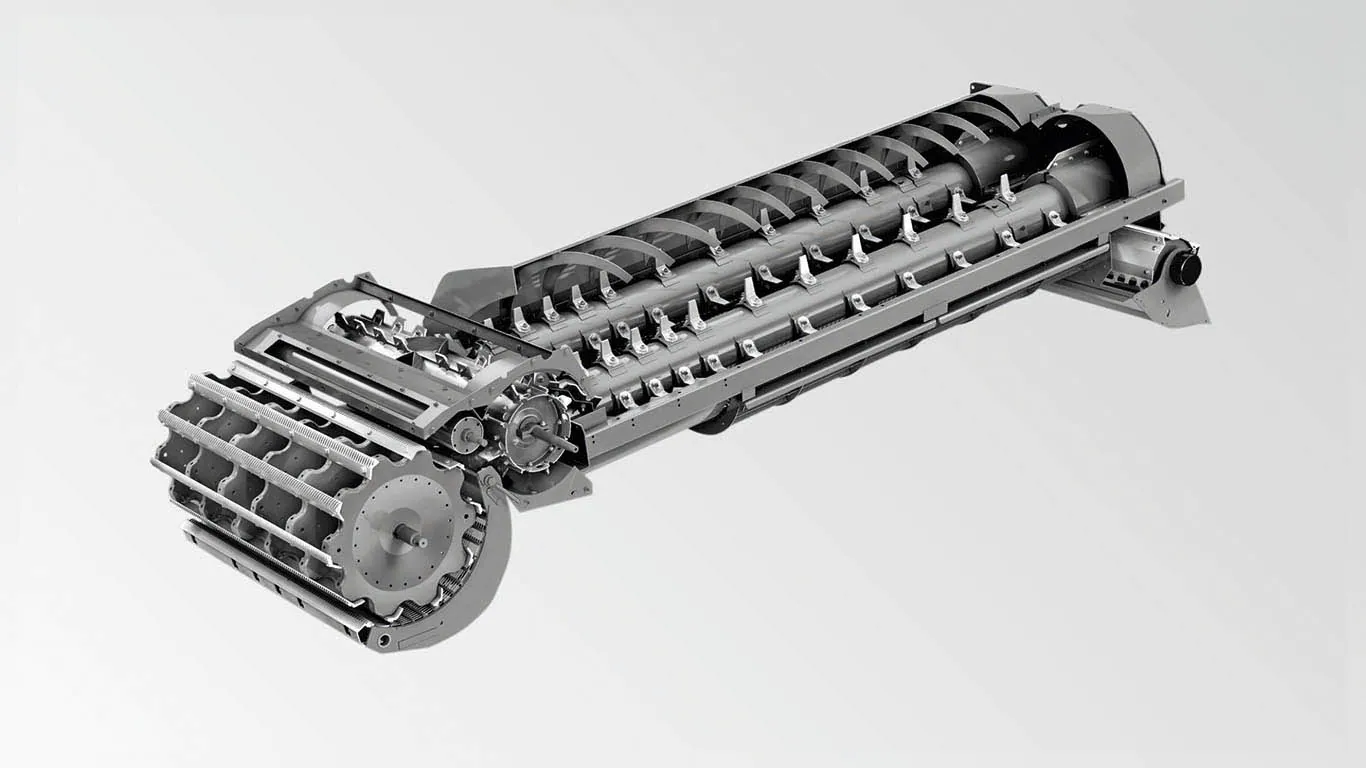
1992 La primera cosechadora híbrida del mundo
La cosechadora CTS (Cylinder Tine Separator) presentaba un cilindro de gran tamaño y la parte delantera cóncava con dos rotores ofrecía una acción de trilla secundaria. Fue la única cosechadora híbrida del mundo hasta 1996, cuando expiró la patente de John Deere. El cuerpo compacto y estrecho ofrecía un rendimiento excepcional y en Asia se sigue vendiendo para cosechar arroz.
1996 Prototipo de receptor StarFire
A medidados de la década de 1990, John Deere comenzó atrabajar con el Laboratorio de Propulsión a Chorro de la NASA para desarrollarun sistema de posicionamiento para la cosechadora. Hubo que invertir en una redde estaciones de referencia terrestre para corregir los errores de la señal desatélite debidos a la ionosfera y otros fenómenos. Este prototipo, conocidocomo ‘green eggs and ham,’ llevó al lanzamiento en 1998 del primer sistemaStarFire, con una precisión de 30 cm. El último desarrollo, el receptorStarFire 7000, ofrece ahora un guiado preciso de hasta 2,5 cm

1999 Monitor Greenstar 1
Con el Parallel Tracking, el conductor tenía que concentrarse mucho para mantener la cosechadora en la línea del centro. Fue con la aparición del AutoTrac, en 2002, cuando llegó el verdadero guiado de manos libre. El monitor también contaba con Harvest Monitor y sistema de cartografía de rendimiento, y muchos de ellos aún se encuentran en uso.

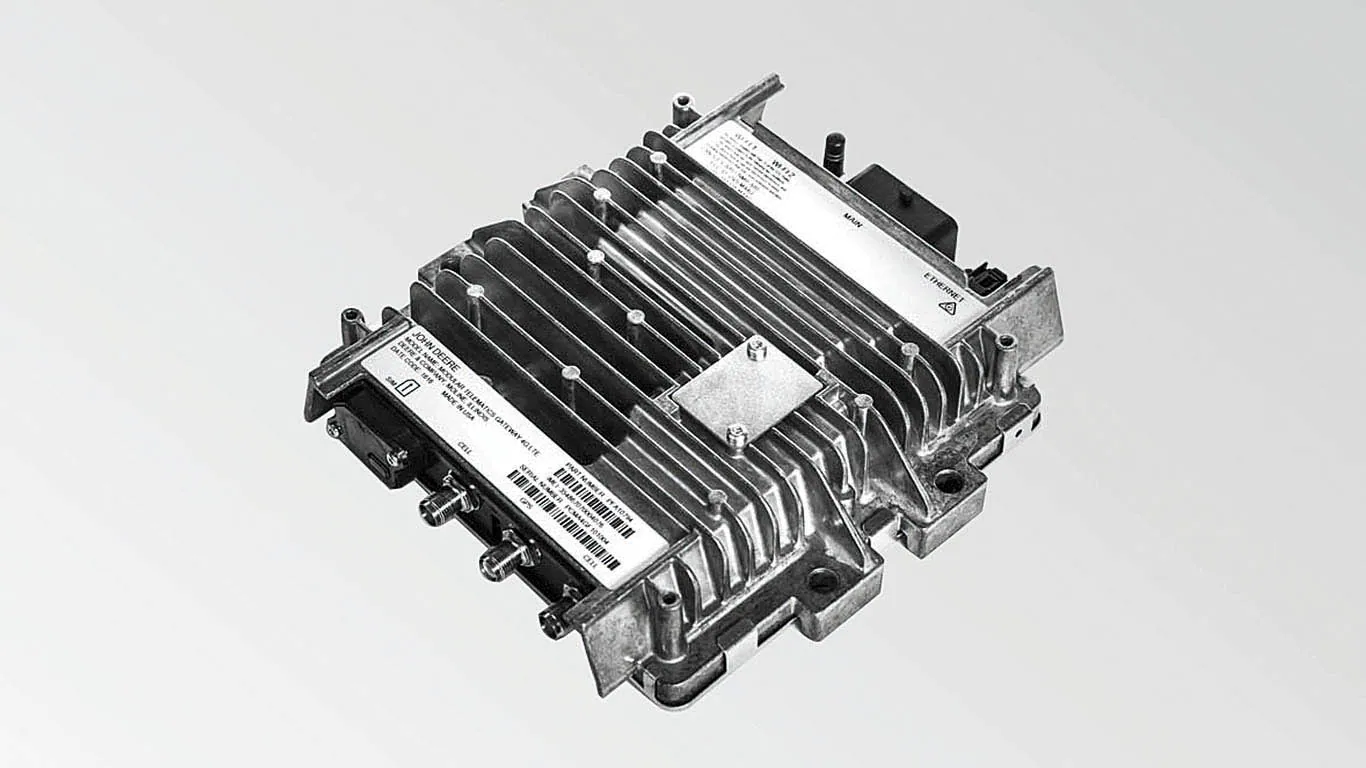
2002 Conectividad de máquinas
En las primeras flotas de cosechadoras se utilizaban banderas para indicar qué cosechadora debía descargarse. Entonces llegaron la radio de onda corta y los teléfonos móviles. The introduction of onboard electronics to enable JDLink machine connectivity is the biggest harvesting innovation of the past 20 years. Transmite datos en tiempo real sobre el rendimiento y el posicionamiento de la máquina para posibilitar el control remoto. Está transformando la planificación del trabajo, la logística de la cosecha y mucho más.
2010 Cosechadora n.º 500.000
Greg Briggs de Cisco, Illinois aceptó la entrega de la cosechadora John Deere n.º 500,000, una 9870 STS el 20 de mayo de 2010. El sistema único de separador de dedos fue un importante cambio respecto al sistema de sacudidor de paja y tuvo tanto éxito que aún se encuentra en las cosechadoras de la serie S, la cosechadora más popular del mundo
75 años de innovación
Vea las cosechadoras del pasado en acción y los hitos quehan transformado la productividad de la cosecha y permitido que el mundoalimente actualmente a hasta 7,8 mil millones de personas.

https://www.youtube.com/watch?v=2jGY8M37Cuw